

The first step to my whole project is figuring out exactly what it is that I want to build. The desired unit would need to control an aircrafts orientation and any maneuvers it makes, all based off of on-board instruments. After a bit of reading, it's clear that an INS, Inertial Navigation System, is what I'm after. To get there, I first have to get an IMU (Inertial Measurement Unit) working.
Note: The following information will be focused on making use of my IMU board, which is technically the beginning of my INS. I just don't want to confuse the two terms.
Gyros and Accelerometers: Typical IMU's use gyroscopes and accelerometers, which is exactly what I'll be using. The combination of the
two types of sensors is needed. Why? Basically, accelerometers are accurate over the long-term, but not short-term due to noise.
Gyros are just the opposite; they are accurate over the short-term, but not long-term due to drift. By "fusing" both sensors together,
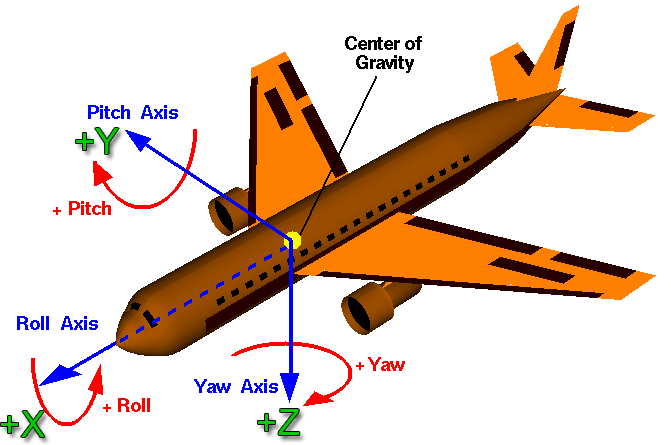
they calibrate each other. However, this works only for the pitch and roll axis since the yaw axis is orthogonal to gravity, so the yaw accelerometer
is unable to help. Therefore, an additional sensor is needed for the yaw axis. Two common ones are magnetometers and GPS units. I'll be using a GPS.
(For more info. on this topic, see: This post)
Sensor Fusion: So the next question is, how do I "fuse" the data from these sensors together and get an output that I can actually use? Simple! Well, not really. But the answer is, sensor fusion! There are many ways of processing & filtering this data. A few of these include:
Coordinate Systems: I think it would be important to note at this point (incase you're not familiar) the standard coordinate systems used to describe the positions of an aircraft. There are basically two systems I will use; one for the Plane, one for Earth:
6DOF Sensor Board: For this IMU, I need 6 degrees of measurement, those coming from the rotations and translations along all 3 axis's. Rotations will be measured by the gyros, and translations by the accelerometers. There are 9DOF units on the market that incorporate a magnetometer, but since I'm going to use GPS, it isn't essential. I may add an independent magnetometer later.
The 6DOF unit I chose is the Razor - 6DOF Ultra-Thin IMU from SparkFun. It has MEM type gyros and accelerometers, 3 of each.
Next steps: Now that I have an initial idea what I want to do and some idea of how to do it, I'll get to work interfacing with my Razor 6DOF sensor board, testing it out, and trying to implement a complimentary filter. I'll be writing my initial program on an Arduino. Next page: Arduino Programming
